由俄罗斯神经科学家伊万·彼德罗维奇·巴甫洛夫(Ivan Petrovich Pavlov)以狗为模式动物发现并建立的条件反射理论是生物系统学习理论的重要基础之一。经典条件反射不仅在生物大脑学习中起着至关重要的作用,也为人工智能学习理论的研究提供了具备生物可行性的机制与基础。近40年来,脑与神经科学以及人工智能的研究者通过神经科学实验与计算建模研究的融合试图研究和揭示经典条件反射实验的神经计算机制并应用于人工智能。然而,这些模型以往只能复现和解释相对有限的经典条件反射实验。
耀世娱乐类脑智能研究中心曾毅团队融合生物学、神经科学等学科在条件反射领域的已有研究成果,依据条件反射的神经基础,即所涉脑区、神经环路、认知功能、神经元尺度的机理与计算机制,提出类脑经典条件反射脉冲神经网络模型,如图1所示。该模型将在条件反射领域达成共识的生物学研究结果整合到一个类脑脉冲神经网络中,相较于其他计算模型,类脑经典条件反射模型可以复现神经科学中提出的多达15种经典条件反射实验,并从计算角度给予合理的解释,有助于揭示生物体建立条件反射的神经机制。此外,该模型可以部署到机器人上,使机器人可以像生物体一样表现出类脑经典条件反射行为(如图2)。经过实验验证,该模型还可以使机器人具备速度泛化的能力(如图3),即在导航任务中,在较低速度下,机器人通过条件反射习得运动轨迹,在较高速度下,不需要再次训练即可完成导航任务。
相关工作以“Brain-Inspired Classical Conditioning Model”为题,近期发表于Cell出版社旗下综合性期刊《 iScience (交叉科学)》。曾毅研究员为论文通讯作者,工程师赵宇轩、研究生乔广参与了此项研究。研究工作得到了中科院战略性先导科技专项、科技部和重庆市科委相关项目资助。
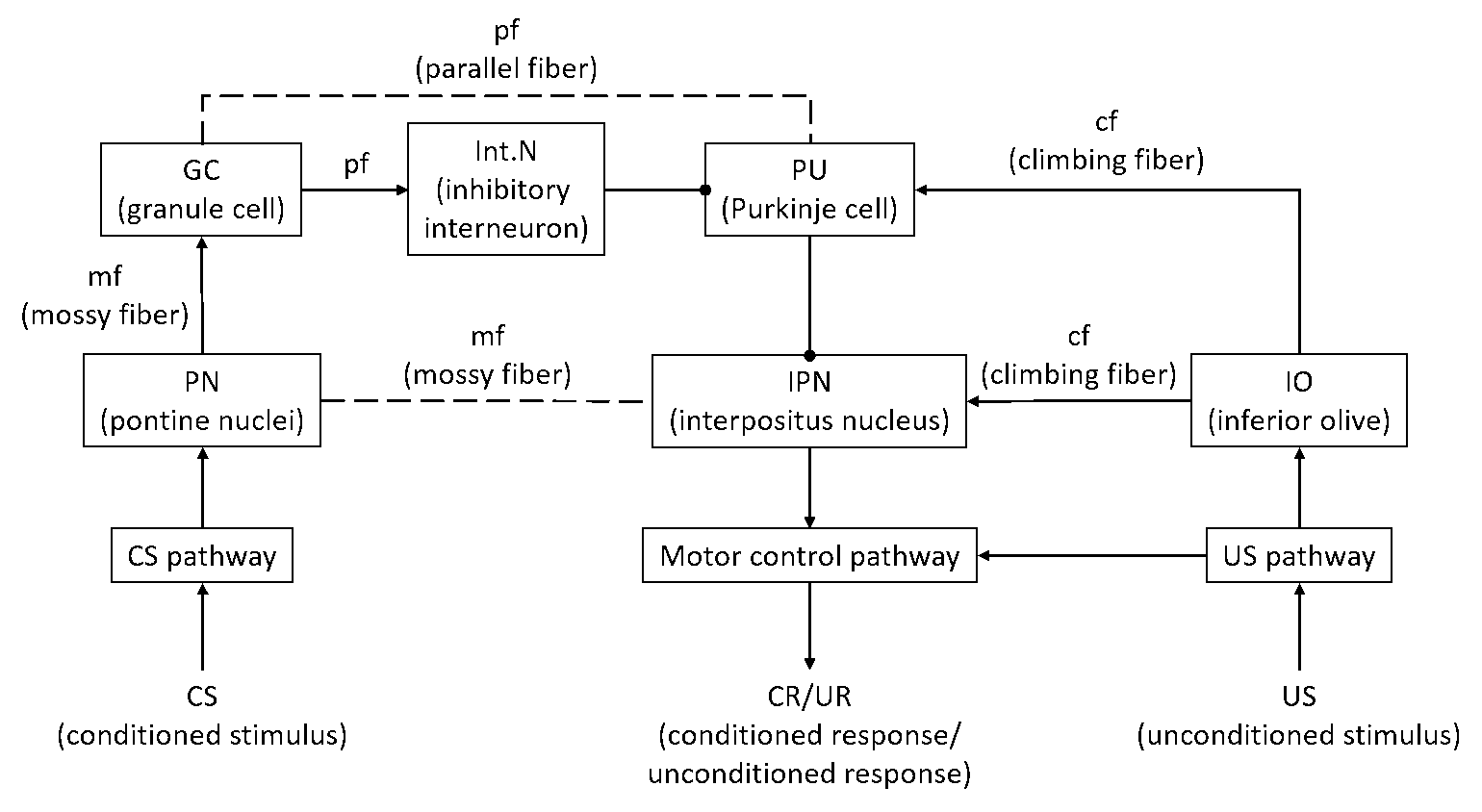
图1.类脑经典条件反射脉冲神经网络计算模型
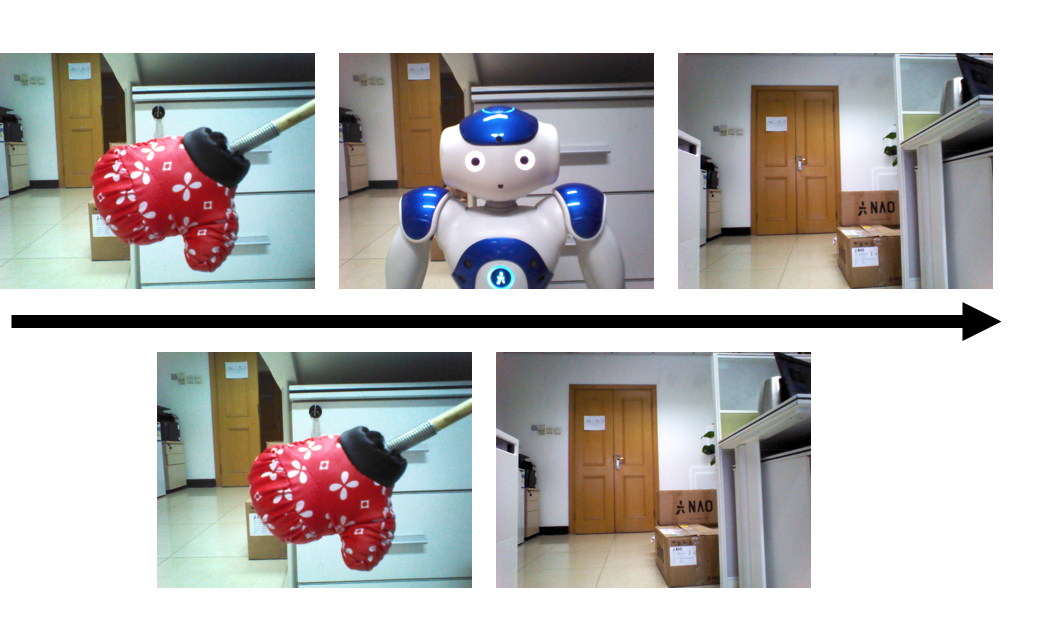
图2.基于类脑经典条件反射脉冲神经网络模型的机器人习得-消退-再习得实验
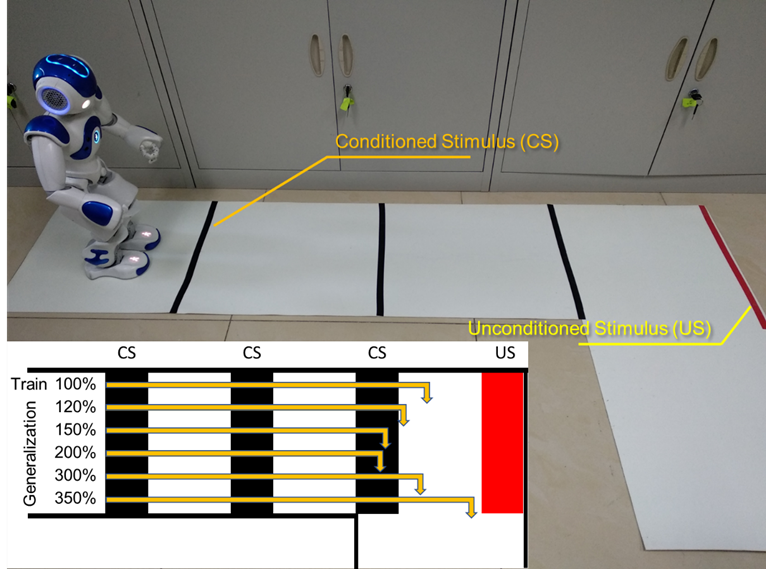
图3.基于类脑经典条件反射脉冲神经网络模型的机器人速度泛化实验