显微视觉具有窄视野、小景深、平面成像等特点,导致小空间内的观测状态不能直接反映操作空间位姿,这种“所见非所得”给复杂场景下的机器人精细操控提出了挑战。近日类脑智能中心邢登鹏副研究员、徐波研究员等研究提出了基于多脑区协同机制的类脑控制架构,较好地解决了小空间、器件遮挡等复杂环境下的精细感知、规划和操控等难题。
该类脑控制架构包括模仿视觉皮层的感知模块、模仿小脑皮层的控制模块、模仿前额叶皮层的规划和预测模块等,并按照相应信息流传递将这些脑区模仿模块进行连接。模仿对应脑区的特性,初级视觉利用卷积操作实现图像状态识别,高级视觉则采用全连接形式实现从图像空间到操作空间的位姿映射;小脑模块借鉴小脑皮层的独特结构实现对各个方向的运动控制;前额叶模块以循环加前向的混合模式实现运动轨迹预测,以分块式兴奋-抑制的连接模式实现不同表征空间的运动规划。
在这一架构下,机器人可以实现高精度的轨迹预测与快速的动作响应,由此克服常规方法无法解决的器件遮挡时的运动规划问题,从而拓宽了机器人精细操控的可控边界。同时,这一类脑控制架构还具有较强的可解释性和灵活性,每个模块均可高精度地实现对应脑区功能,将这些模块进行组合即可适应多种异构精细操控任务。
该类脑控制架构为实现更加高效、灵活、精细的机器操控提供了新思路。相关工作“A Brain-Inspired Approach for Collision-Free Movement Planning in the Small Operational Space”已发布在IEEE Xplore,并将发表于《IEEE Transactions on Neural Networks and Learning Systems》类脑控制专刊。邢登鹏为论文第一作者,张铁林为通讯作者,李佳乐参与相关研究工作,徐波为研究工作提供了方向指导。相关工作得到了国家自然科学基金委、先导B等项目的资助。
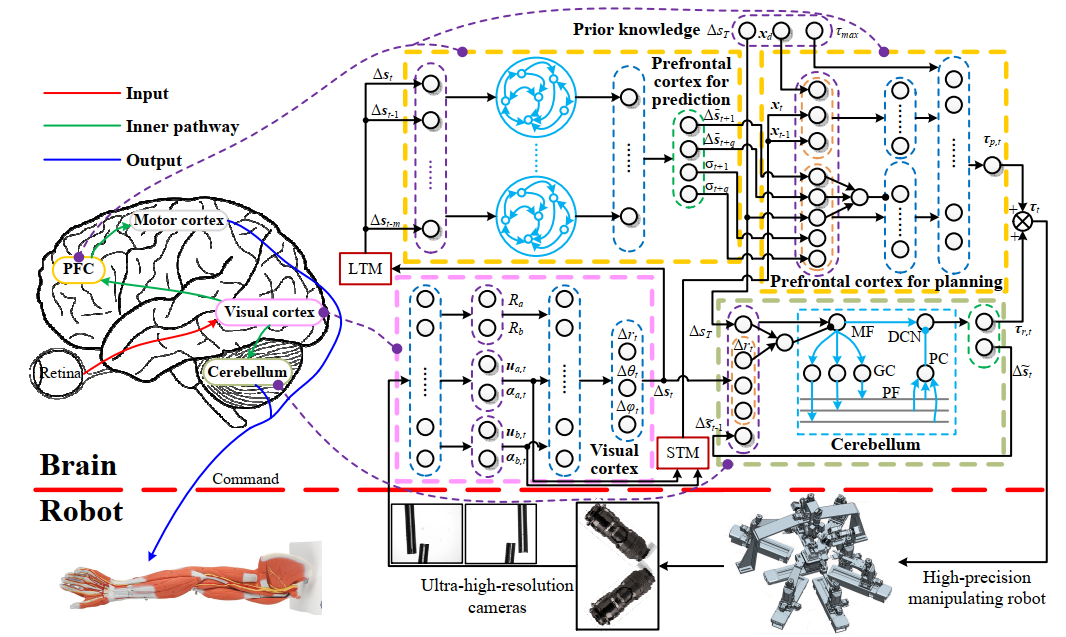
图1. 脑启发的运动控制网络架构。左为每部分模块对应的脑区结构,右为提出的类脑控制网络结构